| GISdevelopment.net ---> AARS ---> ACRS 2004 ---> Data Processing: DEM/3D Generation |
DEM Generation from LIDAR
Data using Morphology Filtering Methods
Yi-Chen
Shao
Department of Civil Engineering, China Institute of Technology
No. 245, Academy Rd., Sec. 3, Nan-Kang District, Taipei, Taiwan 115, R.O.C.
E-mail: shaoyc@cc.chit.edu.tw
Liang-Chien Chen
Center for Space and Remote Sensing Research, National Central University
No. 300, Jung-Da Rd., Chung-li, Taiwan 320, R.O.C.
E-mail: lcchen@csrsr.ncu.edu.tw
Department of Civil Engineering, China Institute of Technology
No. 245, Academy Rd., Sec. 3, Nan-Kang District, Taipei, Taiwan 115, R.O.C.
E-mail: shaoyc@cc.chit.edu.tw
Liang-Chien Chen
Center for Space and Remote Sensing Research, National Central University
No. 300, Jung-Da Rd., Chung-li, Taiwan 320, R.O.C.
E-mail: lcchen@csrsr.ncu.edu.tw
ABSTRACT
In this paper we propose a scheme for DEM generation from LIDAR data. The scheme includes four procedures, (1) seeds selecting, (2) control posts searching, (3) elevation reconstruction and (4) classification. The method is based on grid model with quick and global processing for any kind of terrain type. The main processing includes the concept of morphology filtering algorithms. Noise removing is performed by flat structuring element and object segmentation by H-Dome transformation. After filtering out above-ground object points, ground points can be used to generate DEM. The test data of 8 sites with 15 samples released from ISPRS Commission III Working Group 3 are test for the proposed method. The quantitative assessment of the experimental results is presented and shows promising for practical applications.
1. INTRODUCTION
In the last few years, a number of filtering algorithms have been developed for DEM generation from LIDAR data (Kraus and Pfeipfer, 1998) (Axelsson, 1999) (Vosselman and Maas, 2001). These algorithms filter out object points and use ground points to generate DEM. In 2002, ISPRS Commission III Working Group 3 provided 8 data sites for test of filtering algorithms to generate DEM. In 2003, the accuracy assessment report was published (Sithole and volsselman, 2003). And in 2004, 15 samples of test data was released (ISPRS, 2004). We modify our method proposed of Shao and Chen (2003) and test the ISPRS data. We follow the ISPRS report to make an accuracy assessment of the processing results. The experimental results are promising for applications.
2. THE PROPOSED SCHEME
The algorithms that describe the relationship between ground points and object points can be categorized to slope based, block-minimum, surface based and clustering/segmentation concepts (Sithole and volsselman, 2003). In this paper we assume that the object points are locally higher than their surrounding ground points. We, then, mainly perform two morphology operations to segment object points. The proposed scheme removes the noise and filters out the object points in the LIDAR data. Then the ground points are used to generate DEM. There are 4 steps in the scheme, (1) seeds selecting, (2) control posts searching, (3) elevation reconstruction, and (4) classification. The following sections describe the steps in details.
2.1 Seeds Selecting
LIDAR data is defined as point clouds which contain ground points and object points. Our basic assumption is that the ground points are locally lower than the object points. Therefore we select a lowest point as seeds in a grid of certain size. Some higher outlier points will be removed in this step. Those lowest points in grids form an initial surface. Then the seeds data in grid model can be processed efficiently. This initial surface could contains some object points which have to be removed by further processes.
2.2 Control Posts Searching
In our method, above-ground object points are removed by morphology object segmentation named H-Dome transformation (Vincent, 1993). This operation is illustrated in figure 1. The operation needs to define a parameter height (H) to segment the object points from the point clouds. If the parameter H is lower than the height of an object, some object points would not be removed. On the contrary, if the parameter H is higher, some ground points around the object and on the local higher ground would be removed. The control posts play an important role to maintain the heights of local higher ground like hill or ridge.
Therefore we need to define a proper threshold to eliminate object points and reserve the ground points. For this purpose we search some points located on local higher ground for this operation, and we name the ground points Control Posts. The control posts are added to a large number which is equal to the parameter H. Thus, the original height of the control posts will not be changed through the elevation reconstruction.
2.2.1 Automated Control Posts Searching
Two automated methods are proposed to search control posts. The first one is to perform initial object segmentation by H-Dome transformation with default parameter H. We search a ground points as control posts around the segment objects. The second one is to compare the height difference between the initial surface and existing DEM. And we reserve the points whose height differences are very small with respect to control posts. However, the accuracy of the existing DEM should be high enough or close to LIDAR data. Thus, the height difference between the existing DEM and the ground points of the initial surface will be small enough for this searching.
2.2.2 Control Posts Editing
For the first searching method, some of the control posts may locate on buildings. For the second one, some local higher ground like hill and ridge may miss control posts. Therefore a GUI program is developed for visual check and editing the control posts whether their location is proper or not.
2.3 Elevation Reconstruction
At this step, the initial surface formed by seed points is reconstructed to filter out the outlier noise and object points. We perform three processes for this step, (1) peak noise removing, (2) object segmentation and (3) pit noise removing. Since the initial surface is formed by lowest points in grid, they may contain some pit noise. On vegetation area some ground points may easy to be regarded as pit noise, therefore we remove this kind of noise after removing object points.
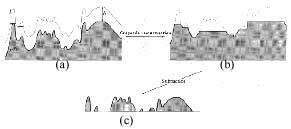
Fig. 1. H-Dome transformation: (a) Original profile; (b) Segmented background; (c) Segmented object (Vincent, 1993)
2.3.1 Peak Noise Removing
Thought the initial surface is formed by lowest points in grid, there still remain some higher outliers as peak noise. We perform an Opening operation with a flat structuring element to remove the peak noise (Dougherty, 1992). This operation is illustrated in figure 2.
2.3.2 Object Segmentation
Once the control posts are searched, they are added to a certain height which is equal to the parameter H. The object segmentation is performed by H-Dome transformation, the local higher points will be filtered out and the original height of control posts will not be changed. Therefore the control posts located on hill and ridge will remain their original height.
2.3.3 Pit Noise Removing
Because the initial surface is formed by lowest points in grid, they may contain some lower outliers as pit noise which can not remove by Opening operation and object segmentation. We perform Closing operation with the flat structuring element again to remove this kind of noise.
2.4 Classification
Since the noise and the object points are removed, a ground surface may be reconstructed. However at the beginning an initial surface is formed by seed points, some ground points would be missed. Thus, here we perform a classification operation to add those missed ground points to the reconstructed ground surface. A TIN model is made by the points of the reconstructed ground surface. We form the initial surface with certain grid size, so the distances between the ground points on the reconstructed surface are close enough. A point with a height within the corresponding vertices is classified to ground points. In this way, the points located on the discontinuity edge of structure line or break line will be remained.
3. EXPERIMENTAL RESULTS
The test data are the ones released from ISPRS Commission III Working Group 3. They contain 8 sites with 4 urban areas and 4 rural areas. Fifteen sample areas are selected as ground truth from the 8 sites.
The parameters of our method are predefined. For the grid size of seed points, we define a certain grid size to contain 2 or 3 points that can ensure to get a lowest point in a grid. The grid size is 2m for urban areas where point spacing is about 1m to 1.5m. On the other hand, when rural areas where sampled with 2.5m to 3m interval, we select 4m for the grid size. The noise removing of flat structuring element is fixed at 3*3 window size. And the parameter H of H-Dome transformation is set to a very large number which is higher than the height of any object, 100m for instance.
Fig 2. Opening operation: (a) Flat Structuring element; (b) Original profile; (c) Operation result (Dougherty, 1992)
Figure 3a and 3b show the elevation images of site 1 and the processing result, respectively. Figure 3c and 3d are the shaded images. We also follow the ISPRS report to make quantitative assessment for accuracy assessment as shown in table 1.
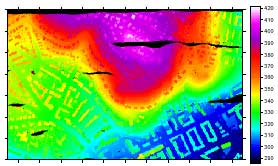
Fig. 3a. The elevation image of site 1
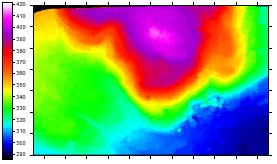
Fig. 3b. The result elevation image of site 1
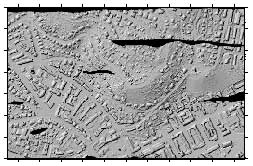
Fig. 3c. The shaded image of site 1
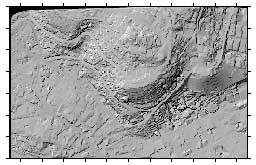
Fig. 3d. The result shaded image of site 1
Table 1. Accuracy Assessment (unit: meter)
4. CONCULDING REMARKS
A scheme contained 4 main processing steps is proposed to filter out the noise and object points from the point clouds of LIDAR data. The seeds data formed a grid model that can be processed effectively. The filtering method with global processing to segment object points can apply to any kind of terrain type. The parameters in our method can be defined automatically. Our proposed scheme can reach the fully automated processing. In order to improve the reliability, a editing procedure for control post selection would be considered for general applications. The LIDAR data released from ISPRS are tested for our method. The quantitative assessment of our results is made. The experimental results show our method is promising for practical applications.
References:
- Axelsson, P., 1999. Processing of Laser Scanner data – Algorithms and Applications. ISPRS Journal of Photogrammety and Remote Sensing, Vol.54, pp.138-147.
- Dougherty, Edward R. 1992, An Introduction to Morphological Image Processing. SPIE Optical Engineering Press, Center for Imaging Science Rochester Institute of Technology.
- Kraus, K. and Pfeifer, N., 1998, Determination of Terrain Models in Wooded Areas with Airborne Laser Scanner data. ISPRS Journal of Photogrammety and Remote Sensing, Vol.53, pp.193-203.
- Sithole, G. and Vosselman, G., 2003. Report: ISPRS Comparison of Filters. ISPRS Commsion III WG3.
- Shao, Y.-C. and Chen, L.-C., 2003. DTM Generation and Building Detection using LIDAR Data. 24th ACRS, Busan, Korea.
- Vincent, L. 1993. Morphological Grayscale Reconstruction in Image Analysis: Applications and Efficient Algorithms. IEEE, Trans. on Image Processing, Vol.2, No.2, pp.176-201.
- Volsselman, G., 2000. Slope Based Filtering of Laser Altimetry Data. IAPRS, Vol.33/B3, pp.935-942.
- ISPRS, 2004, ISPRS Commission III WG3, http://www.commission3.isprs.org/wg3/